 Bestes GMD-Projekt im Jahr 2000 !
Bestes GMD-Projekt im Jahr 2000 !
LOCALITE
Ein Navigationssystem für minimalinvasive Neurochirurgie
Inhaltsverzeichnis
Einleitung
Systemkomponenten
Planungsphase
Operationsphase
Trainingssystem
Produktübersicht
Kooperationspartner
Einleitung
LOCALITE ist ein bildgestütztes Navigationssystem, das minimalinvasive
Eingriffe unter Einsatz von interventionellen Kernspintomographen
unterstützt
und diese Eingriffe präziser und effizienter gestaltet.
Dies wird auf zwei Arten erreicht: Zum einen wird die
Bildwiederholungsrate
deutlich gesteigert, so daß eine interaktive Steuerung des
Operationswerkzeugs
überhaupt erst möglich wird. Zum anderen wird die
Plazierungsphase
des Operationswerkzeugs (Ermittlung von Eintrittspunkt und -richtung) durch
eine geeignete Szene stark vereinfacht.
Aus diesem Projekt heraus wurde ein Spin-off LOCALITE
gegründet, der das Navigationssystem fortführt und vermarktet.
Systemkomponenten
Interventionelle Kernspintomographen liefern im Gegensatz zu
konventionellen
Systemen Bilder während eines operativen Eingriffs. Diese
Realtime-Schichtbilder
enthalten Bildinformationen über den aktuellen Zustand des Patienten.
Die räumliche Ausrichtung des jeweiligen Schichtbildes wird
interaktiv durch Position und Orientierung eines Lokalisationselements
(Handpiece) bestimmt, das über optische Sensoren diese Informationen
an das Computersystem weitergibt. Die eigentlichen Operationswerkzeuge
(z.B. Biopsienadel) werden fest mit dem Handpiece verbunden, wodurch die
absolute Lage des Operationswerkzeugs bestimmt werden kann.
Interventioneller Kernspintomograph
LOCALITE wurde zunächst für den Gerätetyp SIGNA SP der Firma
General Electric Medical Systems entwickelt.
Das FlashPointTM Lokalisationssystem
Das FlashPoint Lokalisationssystem liefert Positionsdaten über die
die Bildgebung während des Eingriffs gesteuert wird.
Es können beliebige Schichten gescannt werden, die eine relative
Orientierung zum Operationswerkzeug haben.

Hier können insbesondere Bereiche von Interesse sein in die das
Operationswerkzeug sich unter Beibehaltung der momentanen Ausrichtung
bewegen
wird. Nachteil dieser Bilderzeugung ist die lange Scannzeit, ca. 5
Sekunden,
und die schlechte Bildqualität.
Planungsphase
Integraler Bestandteil der LOCALITE-Software ist eine Planungsumgebung.
Grundlage für die Planungsphase und Voraussetzung der schnellen
Bildgebung im Realtime-Modus ist der präoperativ erhobene 3D-Datensatz
des Patienten. Diese Bildsequenzen werden gestartet, wenn sich der Patient
in der richtigen Operationslage befindet. Die Erhebung eines solchen
Datensatzes benötigt ca. 7 Minuten.
Aus dem Volumen kann in drei verschiedenen Ebenen -- axial, coronar
oder saggittal -- millimeterweise Schicht für Schicht visualisiert
werden. In jeder Darstellung besteht die Möglichkeit
Trepanationspunkt^
≥Entry" ^ und/oder Zielpunkt ^ ≥Target" ^ zu setzen.
Planning.mov
(17 MB, Quicktime Video)
Navigationsphase
Ist der Zugangsweg geplant, müssen Trepanationspunkt und Orientierung
des Operationswerkzeugs gemäß der Planung auf den Patienten
übertragen werden. Zur Lösung dieser Problematik stellt LOCALITE
eine speziell entwickelte Szene dar, deren Bedeutung und Funktion am besten
die folgende Abbildung veranschaulicht:

Der rote Punkt stellt einen Blick genau in den geplanten Operationskanal
dar, d.h. man sieht nur den Trepanationspunkt, wohingegen der genau
dahinter
liegende Zielpunkt von diesem vollständig verdeckt wird. Der
weiße,
schlanke zylindrische Körper stellt das Operationswerkzeug dar. Die
grün angedeutete Linie ist die Verlängerung der Hauptachse dieses
Werkzeugs, also der zu erwartende Operationsweg. Die optimale Position
ist demnach genau dann erreicht, wenn das Werkzeug als weißer Punkt
im Zentrum des roten Kreises erscheint.
Die komplexe Szene ist bewußt auf ein Minimum an Bildinformation
reduziert worden. Zusammen mit der hohen Abtastrate ^ ca. 4 Hz -- der
FlashPoint-Daten,
die eine gute Auge-Hand-Koordination ermöglicht, konnte die Plazierung
des Werkzeugs stark vereinfacht werden.
Navigation.mov
(18 MB, Quicktime Video)
Operationsphase
In der Operationsphase (Realtimephase) erarbeitet sich der Neurochirurg
einen Weg zum Zielpunkt.
Dank des Kernspintomographen können ihm jetzt Bilder der
momentanen
Situation visualisiert werden.
Vorteil ist die Aktualität des Bildes, wodurch Patientenbewegungen
und Brainshift keine Fehlinterpretationen zulassen.
Nachteile dieser Bilderzeugung sind die lange Scannzeit, ca. 5 Sekunden,
und die schlechte Bildqualität.
In der folgenden Abbildung ist links das Realtime-Bild und rechts das
aus dem präoperativen 3D-Datensatz ermittelte Bild dargestellt.
Wichtig ist, daß es sich für den Neurochirurgen
bezüglich
dieser beiden Bildmodalitäten nicht um eine Entweder-Oder-, sondern
vielmehr um eine Sowohl-Als-Auch-Betrachtung handelt.
So wird durch das rechte Bild ein Bezug zu den Erfahrungen aus der
Planung
hergestellt, und durch das linke Realtimebild kann die "Güte" dieser
eigentlich "veralteten" Bilddaten beurteilt werden.
Realtime.mov(3,5 MB, Quicktime Video)
Trainingssystem
Um den Umgang mit dem System erlernen zu können, existiert eine
Trainingsumgebung,
die ohne Kernspintomographen und FlashPoint-System auskommt. Die Bilddaten
(das MR-Volumen) sind hierzu lokal gespeichert und die Funktion des
FlashPoint-Systems
wird von einem Simulator generiert. Als Patient dient das Modell eines
Kopfes:
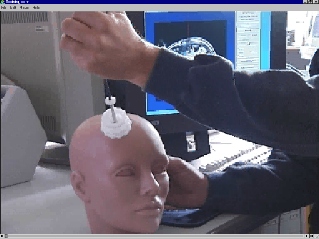
Training.mov
(5,8 MB, Quicktime Video)
Produktübersicht
LOCALITE wurde im Mai 2001 als Medizinprodukt zertifiziert. Bei Fragen
zu dem Produkt wenden Sie sich bitte an Martin Bublat. Email: bublat@localite.de.
Kooperationspartner
-
Heinrich Heine Universität Düsseldorf, Institut für
Diagnostische
Radiologie
-
Heinrich Heine Universität Düsseldorf, Institut für
Lasermedizin
-
Klinikum Krefeld, Neurochirurgie
-
General Electric, Magnetic Resonance Imaging (MRI)
Veröffentlichungen
-
Klaus Kansy, Peter Wißkirchen, Uwe Behrens, Thomas Berlage, Gernoth
Grunst, Marko Jahnke, Ralf Ratering, Hans-Joachim Schwarzmaier, Frank Ulrich (1999)
LOCALITE - a Frameless Neuronavigation System for Interventional Magnetic
Resonance Imaging Systems.
In: Taylor, C., Colchester, A. (Eds.) Medical Image Computing and Computer-Assisted Intervention-MICCAI'99.
Berlin: Springer, ISBN 3-540-66503-X, pp. 832-841
- Uwe Behrens, Martin Bublat, Manja Fieberg, Gernoth Grunst, Marko
Jahnke, Klaus Kansy, Ralf Ratering, Hans-Joachim Schwarzmaier, Peter
Wisskirchen (1998)
Enabling Systems
for Neurosurgery. In: Lemke HU, Vannier MW, Inamura K, Farman A (eds)
Proceedings CAR '98, Elsevier Science, Amsterdam, ISBN 0444829733,
pp. 589-593
- Thomas Berlage, Gernoth Grunst, Klaus Kansy (1999) Grundlagen chirurgischer
Enabling-Systeme und ihre informationstechnische Umsetzung.
In: P.M. Schlag, G. Graschew (Hrsg.)Tele- und computergestützte Chirurgie.
Berlin: Springer, pp. 175-192
Mitarbeiter
Uwe Behrens,
Martin Bublat,
Harald Busse,
Gernoth Grunst,
Marko Jahnke,
Matthias Jungmann,
Klaus Kansy,
Ralf Ratering,
Arno Schmitgen,
Sascha van Stockum,
Peter Wisskirchen,
Marc Wengler
Kontakt:
Klaus Kansy,
Gernoth Grunst,
FhG-FIT